06. Point Clouds
Header Text
Point Clouds
PCD Files
ND313 C1 L1 A03 Point Cloud Data [LB]
Point Cloud Data
Let’s dive into how lidar data is stored. Lidar data is stored in a format called Point Cloud Data (PCD for short). A .pcd file is a list of (x,y,z) cartesian coordinates along with intensity values, it’s a single snapshot of the environment, so after a single scan. That means with a VLP 64 lidar, a pcd file would have around 256,000 (x,y,z,i) values.
Point cloud
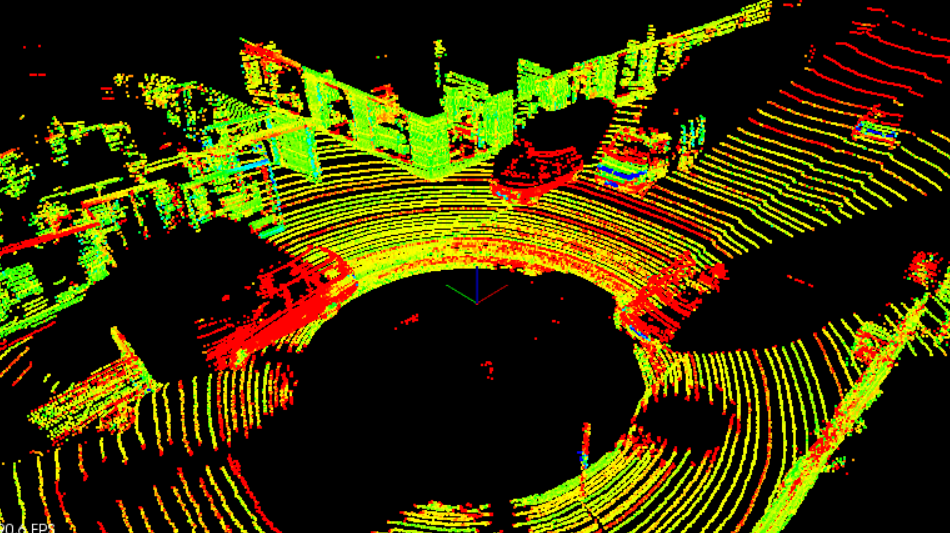
PCD of a city block with parked cars, and a passing van. Intensity values are being shown as different colors. The big black spot is where the car with the lidar sensor is located.
PCD Coordinates
ND313 C1 L1 A04 PCD Coordinates [LB]
PCD Coordinate System
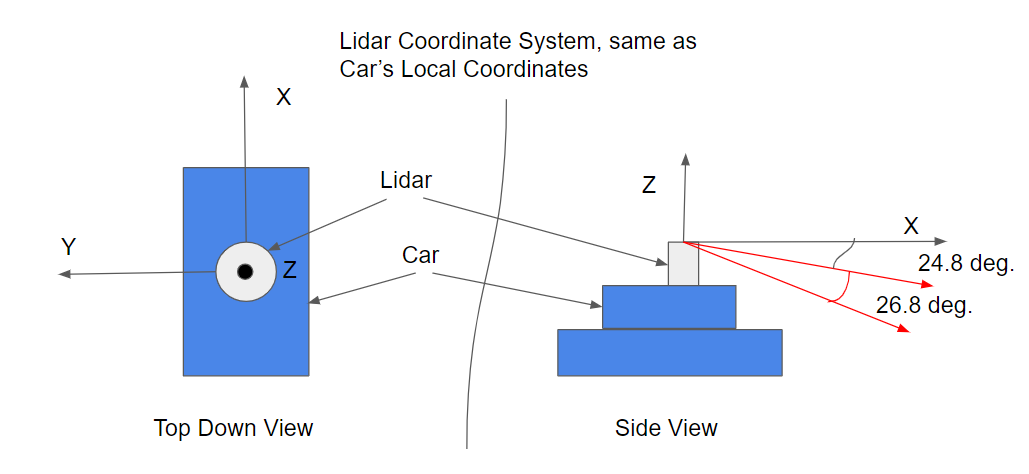
The coordinate system for point cloud data is the same as the car’s local coordinate system. In this coordinate system the x axis is pointing towards the front of the car, and the y axis is pointing to the left of the car. Also since this coordinate system is right-handed the z axis points up above the car.
Coordinates
PCD Coordinate System
Point coordinates